 |
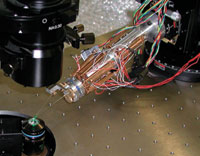
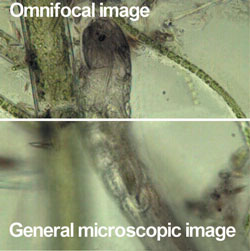
The omnifocal camera capable of focusing on any point in an image and a micro hand system that was developed by emulating the movement of chopsticks realized an operation with precision of "submicron order". The system contributes to the research in the fields of most advanced technologies, including engineering, medical care, biology, etc. The merits of the technology are expected to be most exploited in gene manipulation of cells in the field of biotechnology especially for gene function identification. It is also useful in the medical field.