Water Walker
A
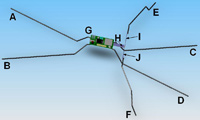
miniature water strider robot
Goal: To develop a microrob  ot
that can maneuver on water with power efficiency and agility. ot
that can maneuver on water with power efficiency and agility.
Approach: To understand the physics of
water striders to model their characteristics of floating on
the surface of water. We are using micro-actuators to simulate
water striders’ movements. We are also investigating different
materials to improve the robot’s ability to float on water.
Benefits: Water strider robots will be
small and relatively efficient. Because it is on the surface
of water and light, the robot will be highly agile and can
reach inaccessible areas for many different applications.
|
| |